MIT · 2025
Boston in 3D: A Citywide Object Archive Using Nerfstudio
Led a team to build a full pipeline for capturing objects across Boston, reconstructing them with Nerfstudio, and presenting them through an interactive map-based web interface.
This project explores how to turn scattered real-world objects into a city-scale interactive 3D archive. Our goal was to capture objects across Boston, reconstruct them into viewable 3D assets, and organize them inside a browser-based map so that users could explore the city through spatially grounded digital objects.
Rather than treating reconstruction as an isolated vision problem, we designed the project as an end-to-end system: mobile capture, neural reconstruction, web visualization, and geographic interaction.
What I did
- Led the project direction and system integration.
- Helped build the pipeline from PolyCam capture to Nerfstudio reconstruction.
- Developed the interactive website for browsing reconstructed objects across Boston.
- Integrated 3D model viewing with a map-based interface.
- Added routing support so users could navigate between locations.
- Built a mesh-quality analysis script for exported
.objassets.
System overview
The workflow begins by scanning real objects around Boston with PolyCam. These captures are then processed in Nerfstudio, where models are trained and exported for downstream use. On the frontend, the reconstructed assets are loaded into a web application built with React and displayed with Three.js. The geographic layer is built with OpenStreetMap and Leaflet, while Leaflet Routing Machine provides route planning between locations.
This design makes the project more than a gallery of 3D objects. It becomes a lightweight interactive archive where reconstruction, visualization, and urban exploration are tied together in a single interface.
Technical highlights
A distinctive part of the project is that it connects several normally separate pieces of the 3D pipeline:
- Capture: PolyCam mobile scanning
- Reconstruction: Nerfstudio-based model generation
- Rendering: Three.js-based model visualization
- Mapping: OpenStreetMap + Leaflet
- Navigation: Leaflet Routing Machine
- Deployment: Vercel
In addition to the interactive app, the repository includes an automated mesh-analysis script that reports geometric and UV-related quality indicators such as polygon composition, watertightness, UV coverage, UV overlap, aspect ratio statistics, and normal consistency. This gave the project a useful quality-control component rather than treating all exported meshes as equally reliable.
Main outcome
The final result was a working prototype for a citywide object archive: users can browse reconstructed objects on a Boston map, open immersive 3D views, and plan routes between locations. The project shows how neural reconstruction tools can be combined with web graphics and mapping systems to create a more public-facing and interactive use case for 3D vision.
Interactive map
The figure below should show the main map interface, where reconstructed objects are placed in a geographic context and can be explored through the browser.
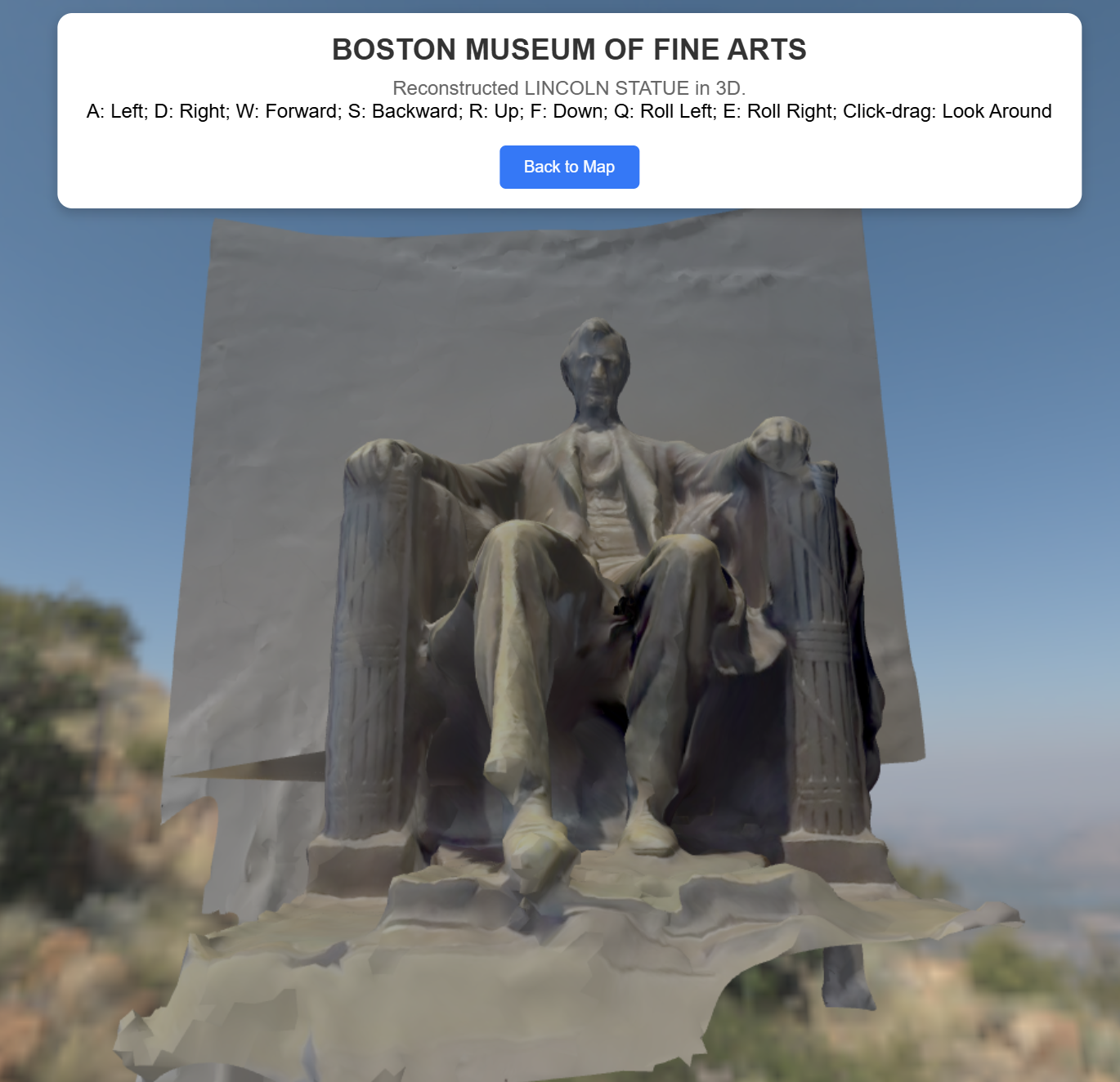
Immersive object view
A second figure should show the object viewer itself. This helps make clear that the project was not only about map visualization, but also about presenting individual reconstructions in a more immersive 3D setting.
Course context
This project was completed as part of the MIT AI+X On-Campus Experience in Winter 2025. The repository credits Qiwen Xiao, John Yechan Jo, and Wenbo An as contributors and documents the public demo deployment on Vercel.